

We previously wrote about the MAUS project, where we are building an auralisation tool to simulate the sound from virtual noise sources outdoors in order to give a realistic representation of how a future noise source will sound when it has been developed. One such noise source that we have been working on is traffic, one of the biggest issues in environmental acoustics. But how do you simulate the sound of traffic on a computer?
First of all, let’s have a listen at some examples of simulated traffic, one for traffic at a distance of a few metres, and one at a distance of tens of metres.
(The following examples are designed to be played back on stereo loudspeakers.)
Our basis for the car sound is a set of recordings performed using microphones placed on a car driving at constant speed. This doesn’t by itself sound much like a car driving by; you don’t get the whoosh as the car passes, or the Doppler shift, or the sound level’s rise and fade as the car approaches and recedes, or subtle but important aural clues such as reflections from nearby buildings and the sound getting deeper as the car goes further away due to the sound absorption in air.
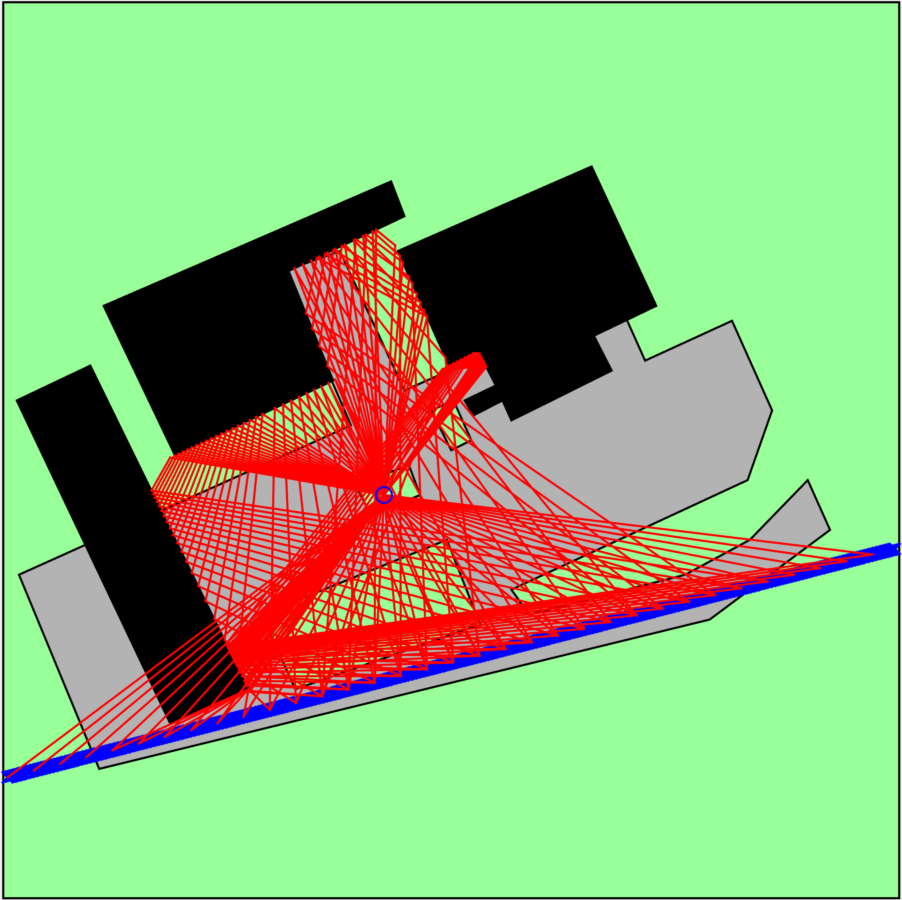 In order to be able to reproduce these effects, we first need to figure out how the sound propagates to the listener from the car at its different positions. In the image on the right, you can see a simple model of a local parking lot, where the green area represents a lawn, the gray area represents asphalt, and the black patches represent buildings. The blue line on the bottom shows the car’s trajectory from left to right, and the red lines represent different paths the sound can take from the car to the listener, which is shown as a blue circle. These sound paths include building reflections and sound bending over and around buildings. Each path is then computed with the Nord2000 method, to find out how the sound is affected when travelling along that path. This gives us most of the effects mentioned above.
In order to be able to reproduce these effects, we first need to figure out how the sound propagates to the listener from the car at its different positions. In the image on the right, you can see a simple model of a local parking lot, where the green area represents a lawn, the gray area represents asphalt, and the black patches represent buildings. The blue line on the bottom shows the car’s trajectory from left to right, and the red lines represent different paths the sound can take from the car to the listener, which is shown as a blue circle. These sound paths include building reflections and sound bending over and around buildings. Each path is then computed with the Nord2000 method, to find out how the sound is affected when travelling along that path. This gives us most of the effects mentioned above.
Another distinctive effect is the Doppler shift, where the pitch of the car is higher when it drives towards the listener and lower when it drives away. We can reproduce this by tracking the sound paths’ length between source and receiver, and resampling the car signal so that the pitch changes as the path length changes. Then we use 3D sound techniques (specifically, spherical harmonics) to reproduce sound in stereo, though other formats such as surround sound would also be equally possible with these techniques.
Those are the basics of the auralisation algorithm. In this way, we can simulate how traffic from that road sounds at any outdoor point in the model. To simulate traffic, we mix together a number of single car pass-bys, each of which sounds similar to this:


