

Horns are used in many fields, including musical wind instruments and loudspeakers. The physics in the two cases is of course the same: sound propagation in a flaring duct open at one end. Therefore we can in principle use the same simulation methods for both cases. But what we want to obtain from the horn simulation can be very different.
A very important requirement for horn loudspeakers is directivity control. This entails directing sound into a specific region in front of the horn, giving the same frequency response inside that region and little sound outside it. Any simulation method for horn speakers must be capable of predicting directivity. Horn speakers should not be resonant, but should present a constant and smooth acoustic load to the driving unit, so this is also an important, but somewhat less critical, factor in the design.
For wind instruments, we are usually interested in the resonance frequencies. This is important for the tone, intonation and playability, and it is useful if we can predict this when designing the instrument. Any simulation method must therefore be able to predict these frequencies accurately. Or we may have an old valuable instrument and want to find the internal shape without cutting it into pieces. Then we can use an optimization algorithm to solve the inverse problem of finding the internal shape from measured resonance frequencies. For this, the simulation method must be fast.
There are three general approaches to predicting horn performance: analytical solutions, numerical solutions, and semi-analytical solutions. The analytical method tries to find a mathematical expression for the solution; this is possible only in a very few geometries. An alternative is to reduce the full 3D wave equation to the 1D horn equation, but now many details are lost, and it is not possible to predict the directivity anymore. Analytical methods are usually fast.
Numerical solution of the problem is possible for almost any geometry, but may require a lot of computation time and/or memory.
The third alternative, semi-analytical solutions, is a middle ground between the two. Let’s look a little closer at such a method.
The Mode Matching Method
Those who have tried to find the optimum placement of a subwoofer in a room may be familiar with the fact that there is a lot of bass in some places, while there is almost nothing in others. Those who have tried to find out why, may have heard of standing waves and room modes.
The modes describe the pressure distributions that are allowed in the room. Below is an example of the pressure distribution that can occur in a room. Along the node lines, the pressure is very low, much lower than at the maxima.
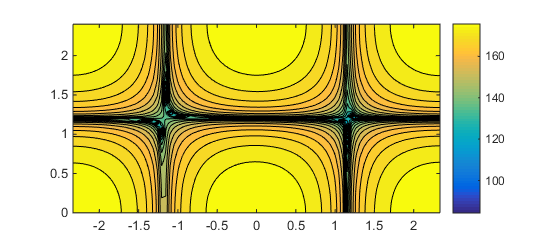 Sound field in a room at a resonance frequency
Sound field in a room at a resonance frequency
At the resonance frequencies, the sound field may be totally dominated by one mode, while between these frequencies, the sound field is a combination of several modes that are only partially excited. For rectangular and cylindrical rooms (and some other geometries, like elliptical) we can find the modes analytically.
What does this have to do with horns? The sound field in a horn can also be described as a combination of modes, just like in a room. After all, both a room and a horn is a more or less enclosed space. The main difference is that the horn expands, and is open at one end.
This difference is important. In the horn, there will be propagating waves; one going outwards, and the other, reflected wave going inwards. In musical instruments, the reflected wave is quite strong, creating strong resonances and standing waves, but some of the wave energy escapes the horn as sound. For loudspeakers, we want to minimize the reflected wave, so that all the energy put into the horn throat comes out as sound at the other end.
So much for the sound along the horn: we could have used the 1D horn equation to arrive at the exact same result. What is interesting now, is the two other dimensions. Provided that the horn has a certain shape, we can find what modes can exist across the horn. This is easy for horns with rectangular and circular cross-sections. So now we can describe the sound field across any plane in the horn as a sum of modes across that plane, multiplied by a weighting factor given by the outgoing and reflected wave.
OK, so we can describe the sound field. What if we want to compute it, given that we introduce a wave into the throat of the horn? Maybe we have a plane wave, or a pressure distribution described as a sum of modes. We want to know the sound field at the mouth of the horn, because then we can compute the directivity. We also want to know how much reflection there is at the mouth, to find the frequency response or resonance frequencies of the horn.
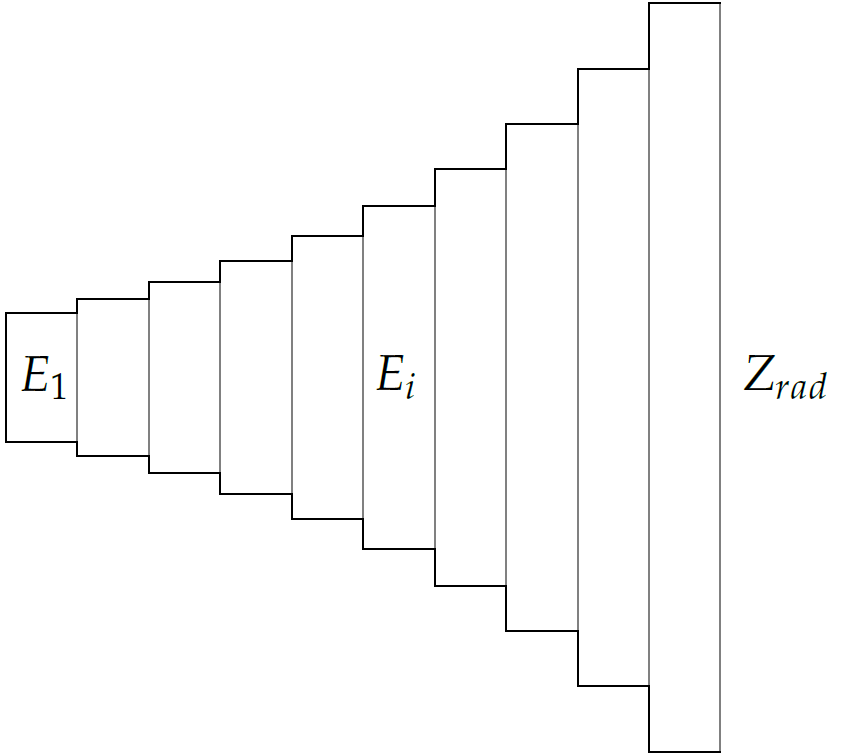
We immediately run into a problem: the horn expands, and the mode description at the throat does not fit the horn a short distance out. In fact, if we divide the horn into slices, or elements, as shown below, the modes will be different from element to element. (And we cannot avoid dividing the horn into elements, because then we must know the analytical solution for the entire horn. The reason we are exploring the mode matching method in the first place is that we don’t know this solution.)
The way to solve this problem is to take the sound field in one element, and try to describe it by the modes of the next element. One may for instance take the first mode in element 1, and describe it by the modes in element 2. Then the second mode, and so on. One will then discover that each mode in element 1 must be described by very many of the modes in element 2. There is no 1:1 coupling, rather, there is what is called modal coupling. An example is shown in the figure below.
In this example, a wave, in the form of a single mode, arrives at the element interface. The velocity distribution of this mode is shown by the dashed line, and it ends at the wall of element 1, which is at x=1. This distribution is perfectly described by a single mode in element 1. But as it crosses the interface, no single mode in element 2 can describe the shape, which would ideally look like the solid blue line, that jumps to zero at x=1. Just like describing a square wave with a Fourier series requires infinitely many terms, describing this jump in the mode system in element 2 requires infinitely many modes. In reality, this is what would happen, but it is not practical when doing a numerical calculation, as it would require infinite memory and infinite computation time. The result of using fewer modes is illustrated by the solid black line.
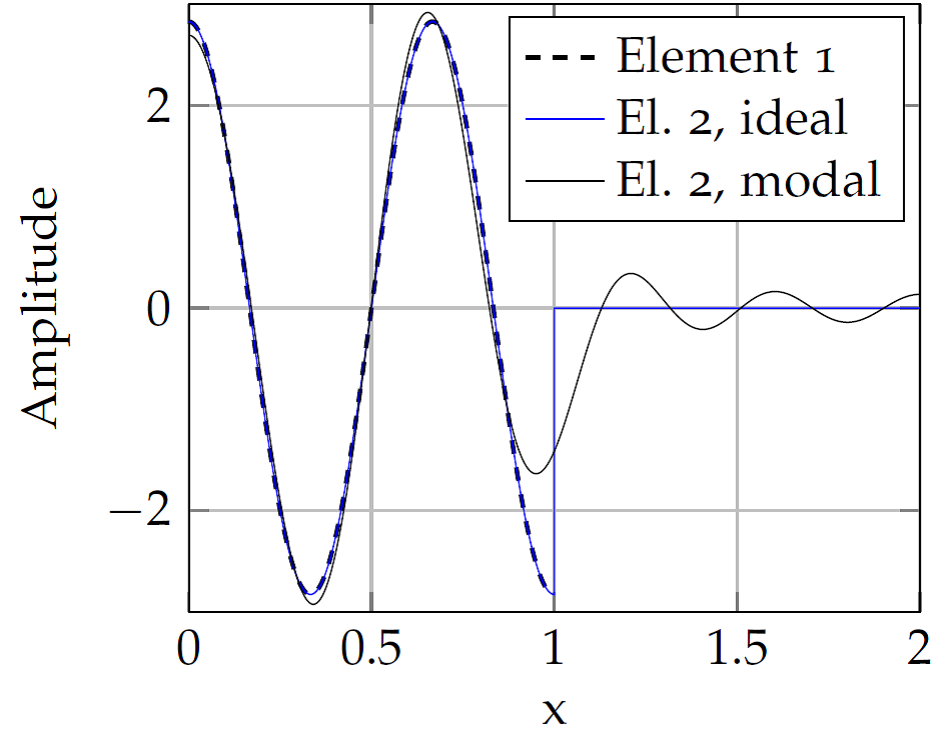 Modal coupling from one element to another. x is the distance from the center line of the horn to the wall. Element 1 ends at x=1, element 2 ends at x=2. The dashed line shows the velocity distribution in element 1, a single mode. An attempt is made to describe this velocity distribution by a finite number of mode functions in element 2, solid black line.
Modal coupling from one element to another. x is the distance from the center line of the horn to the wall. Element 1 ends at x=1, element 2 ends at x=2. The dashed line shows the velocity distribution in element 1, a single mode. An attempt is made to describe this velocity distribution by a finite number of mode functions in element 2, solid black line.
Therefore, even if the wave at the throat contains only a single mode, the horn will generate new modes as the wave propagates through it. (This does not mean that the horn generates distortion, there are no new frequencies generated. But the spatial shape, or pressure distribution, changes.)
There is also another peculiar thing with modes: mode cut-off. The modes also have to propagate along the straight elements in the horn pictured above. It turns out that if the vibration frequency is below a certain frequency, certain modes will not propagate. Instead, they will die out exponentially. This frequency is given by the resonance frequency across the horn for the mode in question. A mode can only propagate at frequencies above its own resonance frequency.
If we start at a low frequency and slowly increase it, we will see that more and more modes can propagate, as the vibration frequency passes through the resonance frequency of each mode. Since the modes are different for each element, we may expect that this does not happen everywhere at once. The elements with the largest cross-section will allow modes at lower frequencies than the smaller ones. And so more and more modes will propagate as we come closer to the mouth of the horn.
When we finally come to the mouth of the horn, we can convert back from modes to pressure or velocity distribution, and calculate the directivity of the horn.
In summary, the mode matching method works like this: the horn is divided into short elements, and the mode coupling at each element-to-element interface is found. Pressure and volume velocity can now be propagated through the horn, from the throat to the mouth.
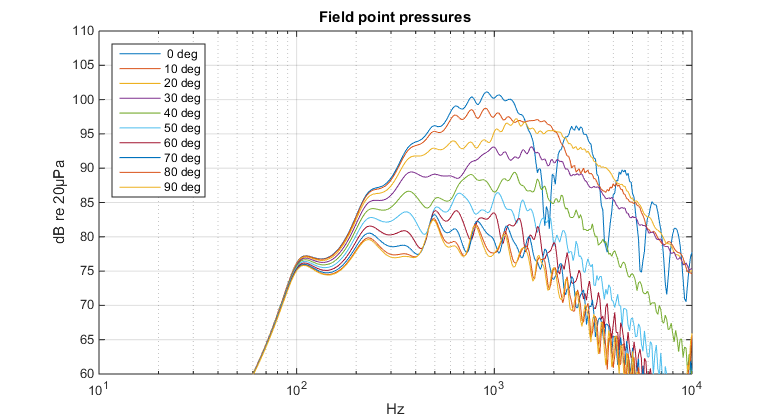 Example of frequency response at various angles calculated for a loudspeaker with a conical horn, using the Mode Matching Method
Example of frequency response at various angles calculated for a loudspeaker with a conical horn, using the Mode Matching Method


